Research
Research Interests
My research lies at the intersection of real-time embedded systems (RTES), cyber-physical systems (CPS), and robotics and autonomous systems (RAS). The overarching vision is to advance the development of adaptive, safe, and predictable mixed-criticality and safety-critical systems. My key research areas include:
- Real-time scheduling and allocation on multi-cores, CPU-GPUs, network-on-chips (NoC) and time-sensitive networks (TSN);
- Flexible, feedback-driven approaches to resource scheduling of CPS, including avionic, industrial control, robotic, and transportation;
- Digital Twins to support design, simulation, verification, and optimisation of CPS;
- Hardware-software co-design, and investigate timing-predictable hardware.
Collaborations: I am working with academics and companies from UK, US, France, Germany, Portugal and China (mainland, Taiwan and Hong Kong), and I am open to collaborations related to these topics and fields, addressing open problems and grand challenges both from industry and academia, with a focus on timing and scheduling, and applications in real-time embedded systems, cyber-physical systems and autonomous systems.

Research Grants
- Co-I, Innovate UK, SCHEME: Safety Critical Harsh Environment Micro-processing Evolution, £2.2m out of £22.4m, 05/2023-04/2028
- PI, University Research Priming (URP) Capital Funding, RAVEN: Real-time Adaptive Virtual-twin Environment for Next-generation Robotics in Virtual Production, £48,746, 10/2025-07/2026
- PI, Google Cloud Research Credits Program, Imitation Learning of Humanoids Robots for Filming, £3,731, 10/2025-04/2026
- PI, XR Stories R&D Residency Programme, Digital Twin and Robotics for Virtual Production, 05/2025-04/2026
- PI, ECR Funding, Safe, Adaptive and Resilient Scheduling of Real-Time Systems, £6K, 09/2023-09/2026
Research Projects
➤ SCHEME: Safety Critical Harsh Environment Micro-processing Evolution
Developing a new generation of UK-native, safety critical and cyber-secure microprocessors for aerospace applications. The SCHEME project aims to build UK national resilience in high-integrity avionics design and manufacturing. SCHEME has been featured in the UK Government’s Advanced Manufacturing Plan.

➤ MOCHA: Modelling and Optimising Complex Heterogeneous Architectures
The aim of MOCHA is to research into building statistical models of systems and adaptive policies for complex heterogeneous architectures, addressing high overheads and low cache hit rates in real-time systems.

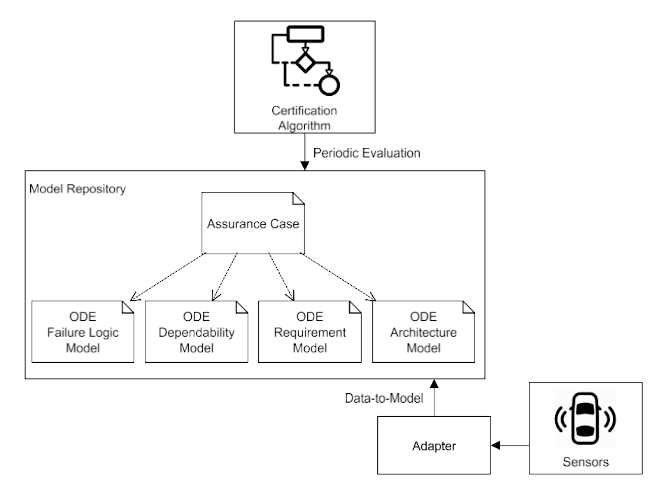
➤ DEIS: Dependability Engineering Innovation for CPS
Developing technologies for dependable system integration through the concept of Digital Dependability Identity (DDI) for cyber-physical systems.
Key outcomes of DEIS include contributions to the OMG System Assurance Case Metamodel (SACM) standard and the Assurance Case Modelling Environment (ACME) tool.
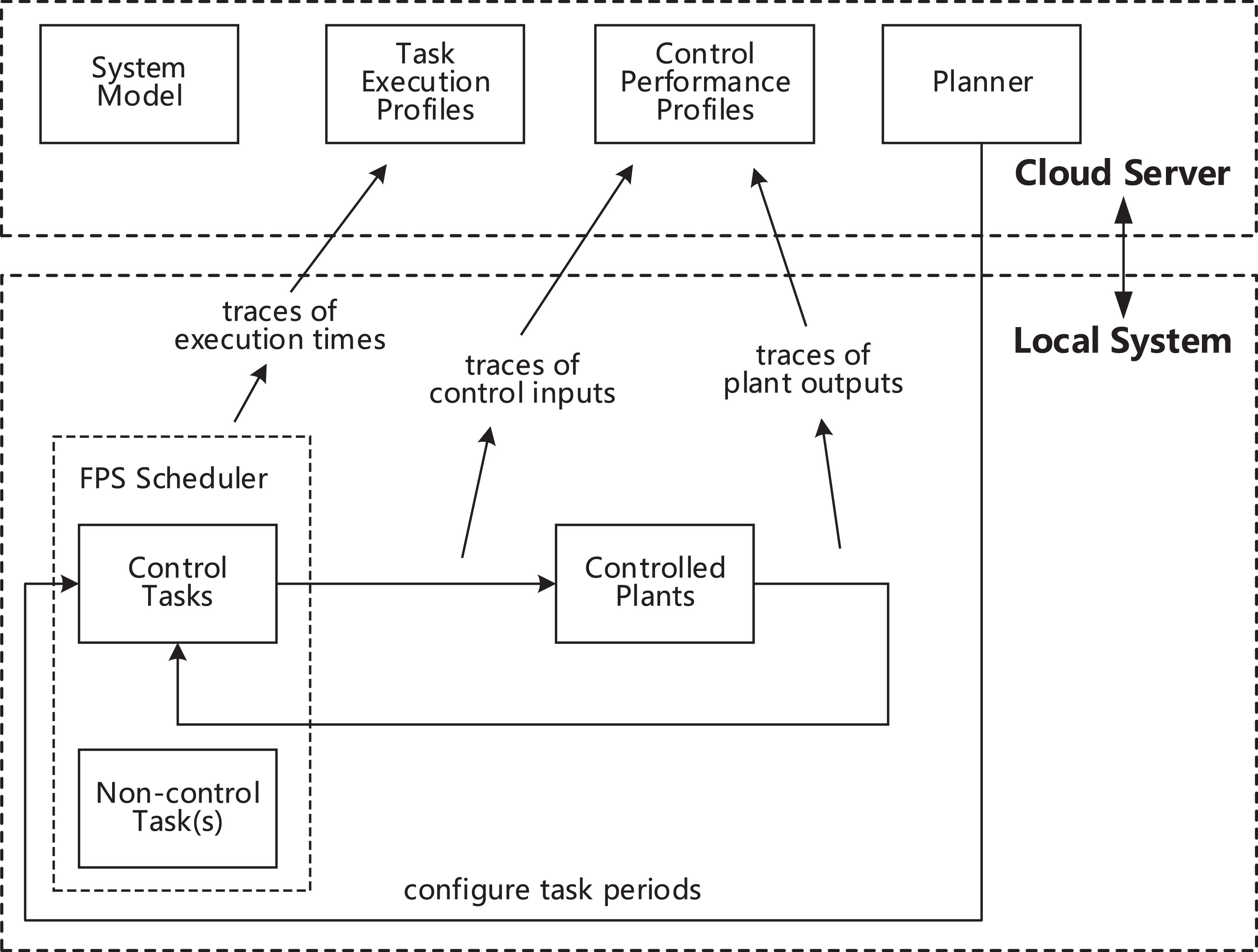
➤ ATAS: Adaptive Task Scheduling Framework for CPS
Adaptive Task Scheduling Framework for CPS (ATAS) is an adaptive real-time scheduling framework for Cyber-Physical Control Systems. ATAS includes a hierarchical structure, with dynamic worst-case execution time analysis, period adaptation and dual-period operational modes.
Talks and Invited Presentations
- Conference talk, “LEFT-RS: A Lock-Free Fault-Tolerant Resource Sharing Protocol for Multicore Real-Time Systems”, IEEE Real-Time Systems Symposium (RTSS'25), Dec 2025 (presented by Dr. Nan)
- Invited talk, “Digital Twin for Real-Time Cyber-Physical Systems”, Systron Lab Research and Demo day, Aug 2025
- Conference talk, “Digital Twin for Real-Time Embedded Systems”, 11th International Symposium On Leveraging Applications of Formal Methods, Verification and Validation (ISoLA'22), Oct 2022
- Conference talk, “Resilience-aware Mixed-criticality DAG Scheduling on Multi-cores for Autonomous Systems”, Ada-Europe International Conference on Reliable Software Technologies (Ada Europe'22), June 2022 (presented by Jie Zou)
- Conference talk, “Discretization and Stabilization of Energy-based Controller for Period Switching Control and Flexible Scheduling”, American Control Conference (ACC'22), June 2022 (presented by Dr. Tafrashi)
- Invited talk, “Digital Twin for Scheduling in Embedded and Real-Time Systems”, 6th Annual UK System Research Challenges Workshop, Nov 2021
- Conference talk, “Digital Twin for Dependable Multi-Core Real-Time Systems — Requirements and Open Challenges”, IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS'21), May 2021
- Conference talk, “DAG Scheduling and Analysis on Multiprocessor Systems”, IEEE Real-Time Systems Symposium (RTSS'20), Dec 2020 (presented by Dr. Zhao) [Video]
- Conference talk, “Fixed-Priority Scheduling and Controller Co-Design for Time-Sensitive Networks”, International Conference on Computer Aided Design (ICCAD'20), Nov 2020 [Video]
Featured in Media
- SCHEME Project, featured in the UK Government’s Advanced Manufacturing Plan, Nov 2023
Open-Source Software
- dag-gen-rnd: A Randomized Multi-DAG Task Generator for Scheduling and Allocation Research
- DAG Scheduling Simulator on Multiprocessor Systems
- Fixed Priority Scheduling and Controller Co-Design for TSN
- Line-Circle-Square (LCS): A Multilayered Geometric Filter for Edge-Based Detection
Please check my GitHub for more projects.